
Beacon을 이용한 위치추적과 자율주행 자동차
개요
아두이노를 이용하여 자율주행 자동차와 컨트롤러를 제작하고, beacon으로 위치추적을 하였습니다.
- Arduino UNO보드와 L298P보드, 초음파 센서를 이용하여 Level3 자율주행 자동차 제작
- Arduino UNO보드와 조이스틱을 이용하여 조이스틱 컨트롤러 제작, I2C LCD로 자동차 상태 표시
- HC-11을 이용하여 자동차와 컨트롤러 간의 RF통신 구현
- BOT CLE310 3개로 beacon을 구현하고 HOST CLE310 1개로 beacon들의 RSSI값을 SCAN하여 자동차의 위치를 추적
개발 필요성 및 목적
4차 산업혁명 시대에 드론을 통한 무인 배달이 각광받고 있으나 드론으로는 대량의 물량을 수송할 수 없으며 드론이 가지 못하는 환경도 분명 존재한다. 그래서 대량의 물량을 수송할 수 있는 자율주행 자동차로 배달을 하는 시스템을 구현하고자 한다.
보통 위치는 GPS로 추적하는 것이 일반적이지만 GPS는 오차 범위가 크므로 실내의 작은 공간에도 적용이 가능한 beacon을 이용하여 위치 추적을 하고자 한다.
그리고 자율 배달 과정에서의 여러 변수들을 통제하기 위해 장애물 회피, 사람이 직접 조작이 가능한 시스템을 추가하고자 한다.
작품 제작
자율주행 자동차 제작
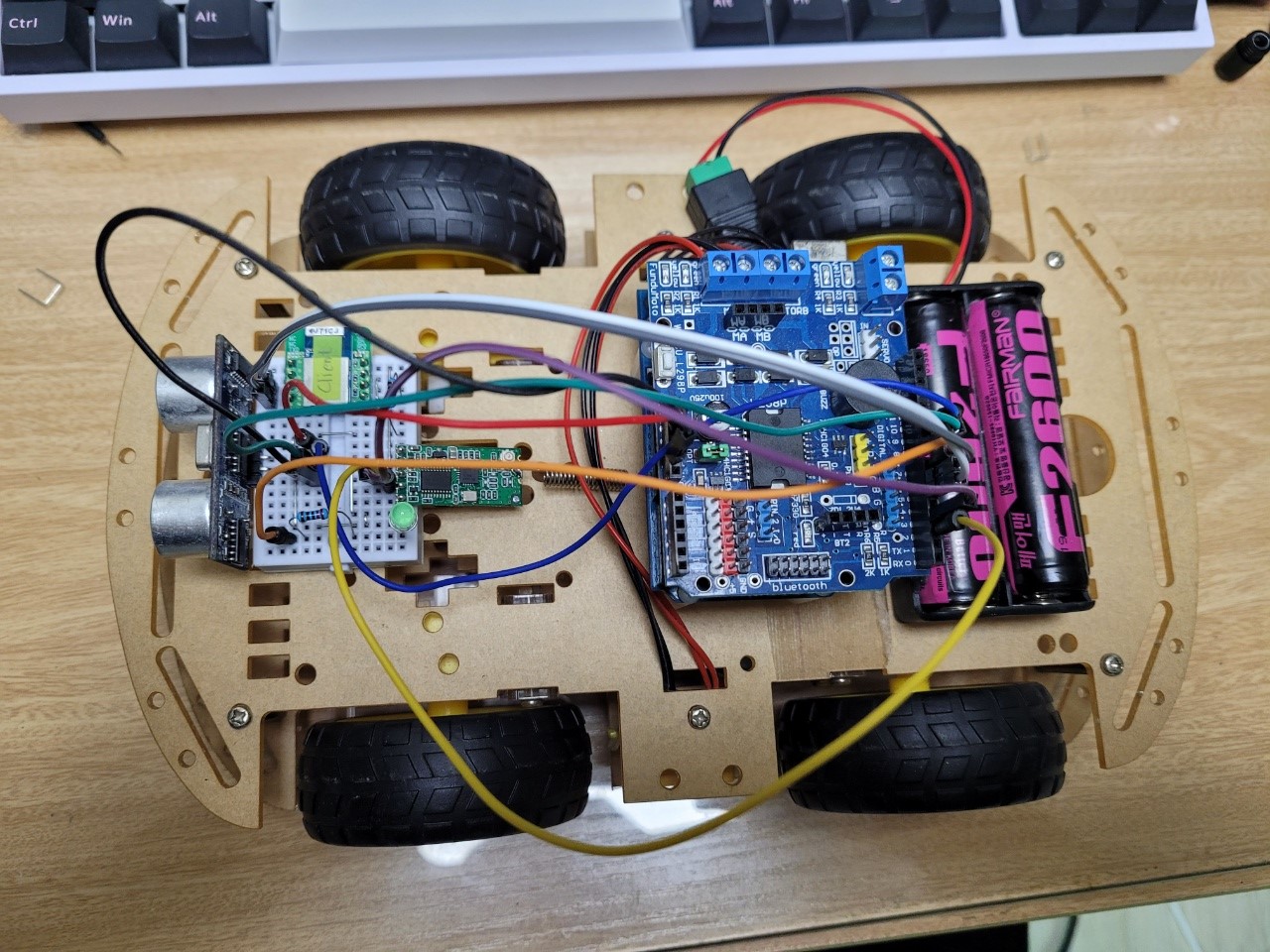
Arduino UNO보드와 L298P보드, 초음파 센서를 이용하여 Level3 자율주행 자동차 제작
선행 연구인 “태양광 자율주행 자동차” 의 자동차를 활용
- 3.7 V, 2600 mAh인 18650 리튬 이온 전지 2개를 이용하여 7.4 V의 전원을 공급해준다.
- 하비 기어모터를 좌우에 각각 2개씩 연결한다.
- L298P보드로 DC모터의 전류 방향을 바꿔서 회전 방향을 바꾼다.
- 스키드 조향 방식으로 방향 제어를 하며 제자리 선회도 가능하다.
- 초음파 센서를 이용해 거리 측정을 하여 전방 10cm 이내에 장애물이 있을 시 왼쪽으로 제자리 선회하여 장애물을 회피한다.
- 초록 LED로 on/off 상태를 나타낸다.
- HC-11을 이용하여 조이스틱 컨트롤러와 RF통신을 하여 조종할 수 있게 하고 위치를 보낸다.
- RF통신의 속도가 너무 빠르면 신호가 겹치므로 0.5초 간격으로 통신한다.
- HOST CLE310의 GPI를 HIGH로 해서 AT커맨드가 작동하도록 한다.
- HOST CLE310로 beacon들의 RSSI 값을 SCAN하여 parsing 후 자동차의 위치를 추적한다.
소스 코드
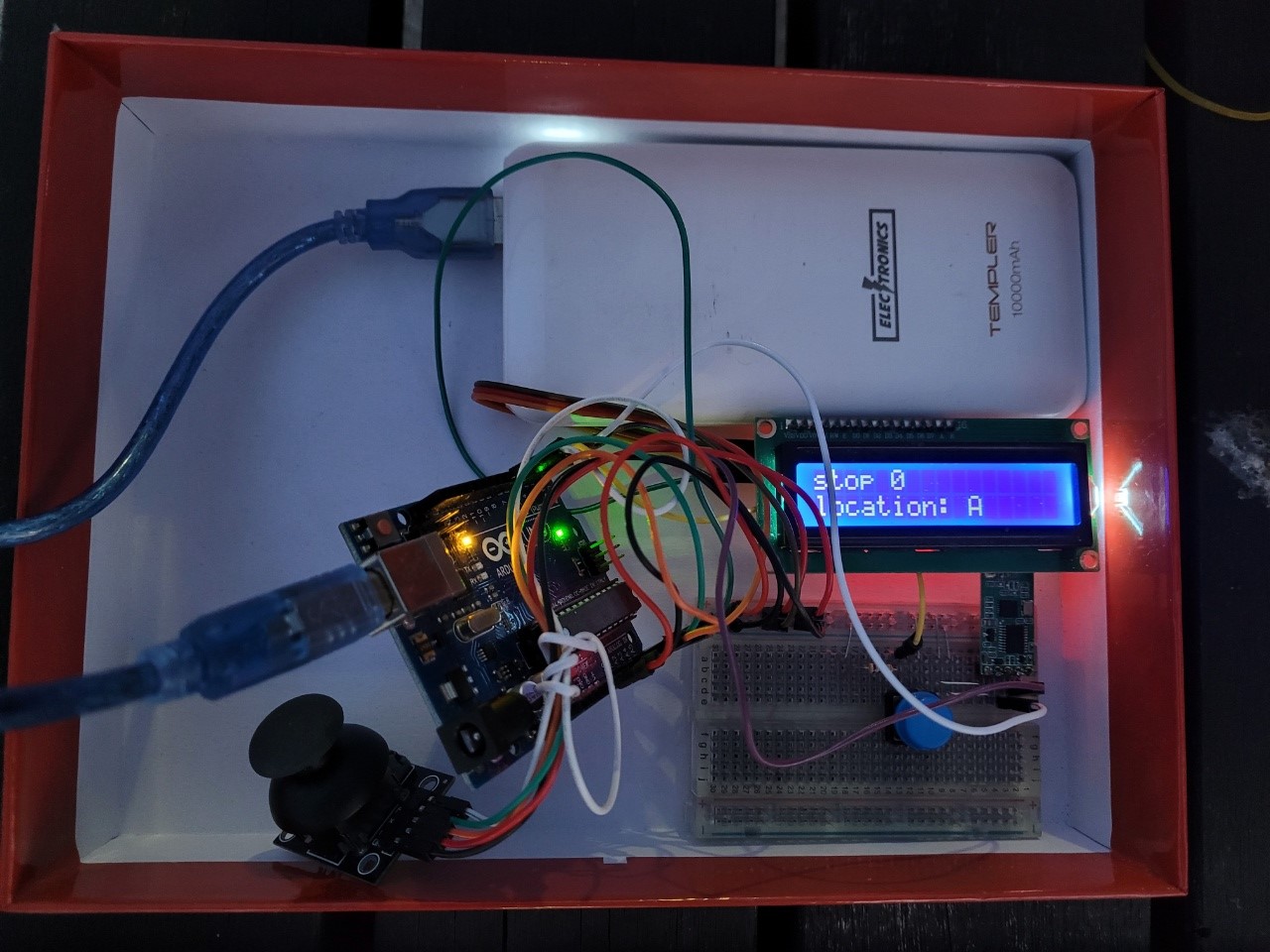
조이스틱 컨트롤러 제작
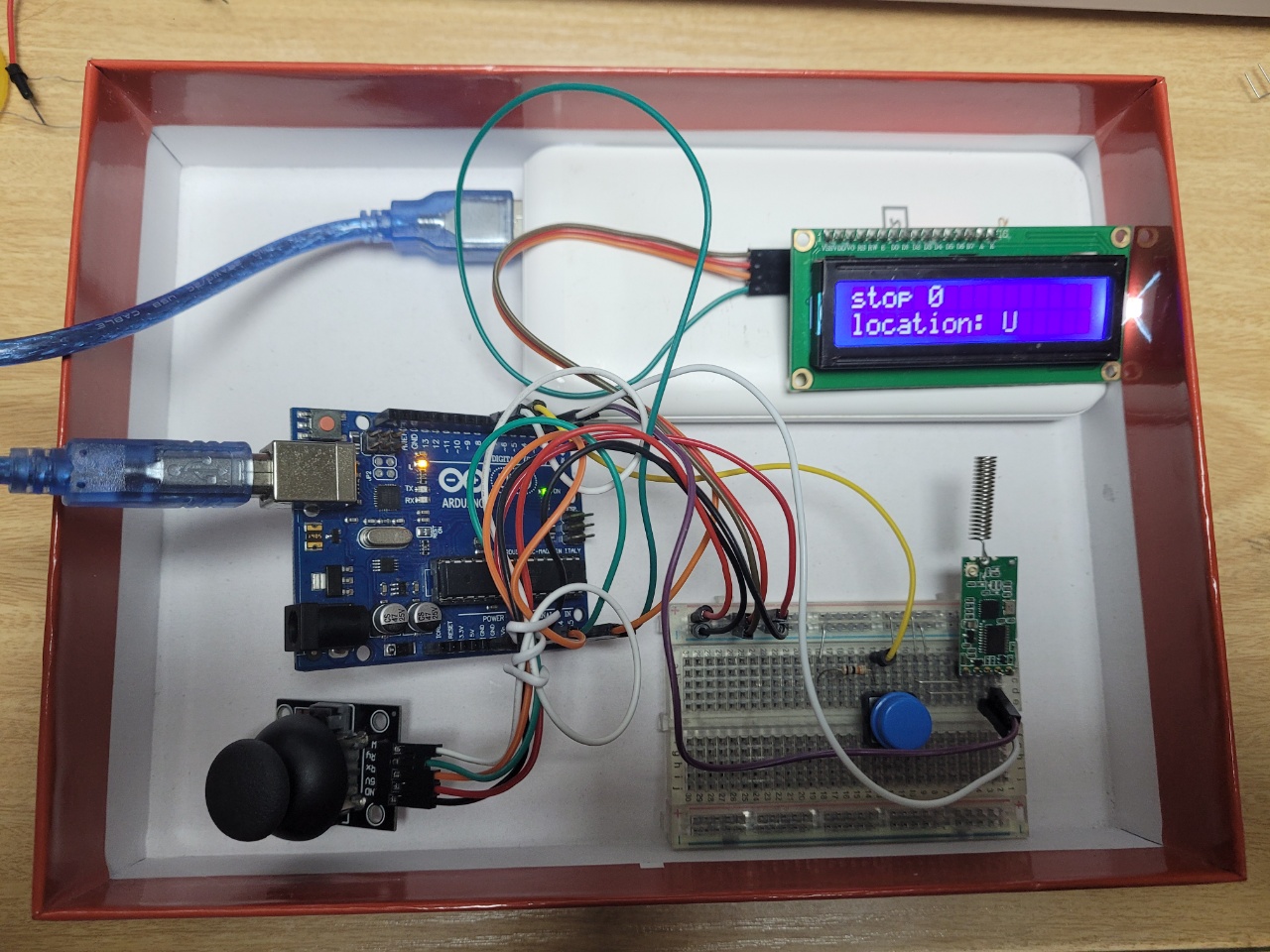
Arduino UNO보드와 조이스틱을 이용하여 조이스틱 컨트롤러 제작, I2C LCD로 자동차 상태 표시
- 조이스틱의 신호를 I2C LCD에 표시하고 HC-11을 이용하여 자동차와 RF통신을 하여 조종할 수 있게 한다.
- HC-11을 이용하여 자동차와 RF통신을 하여 자동차의 위치를 받는다.
- RF통신의 속도가 너무 빠르면 신호가 겹치므로 0.5초 간격으로 통신한다.
- I2C LCD 첫 줄에는 자동차의 방향과 속도가 나오며 둘째 줄에는 자동차의 위치가 나온다.
- 버튼을 누르면 자동차가 위치추적을 하게 한다.
알고리즘
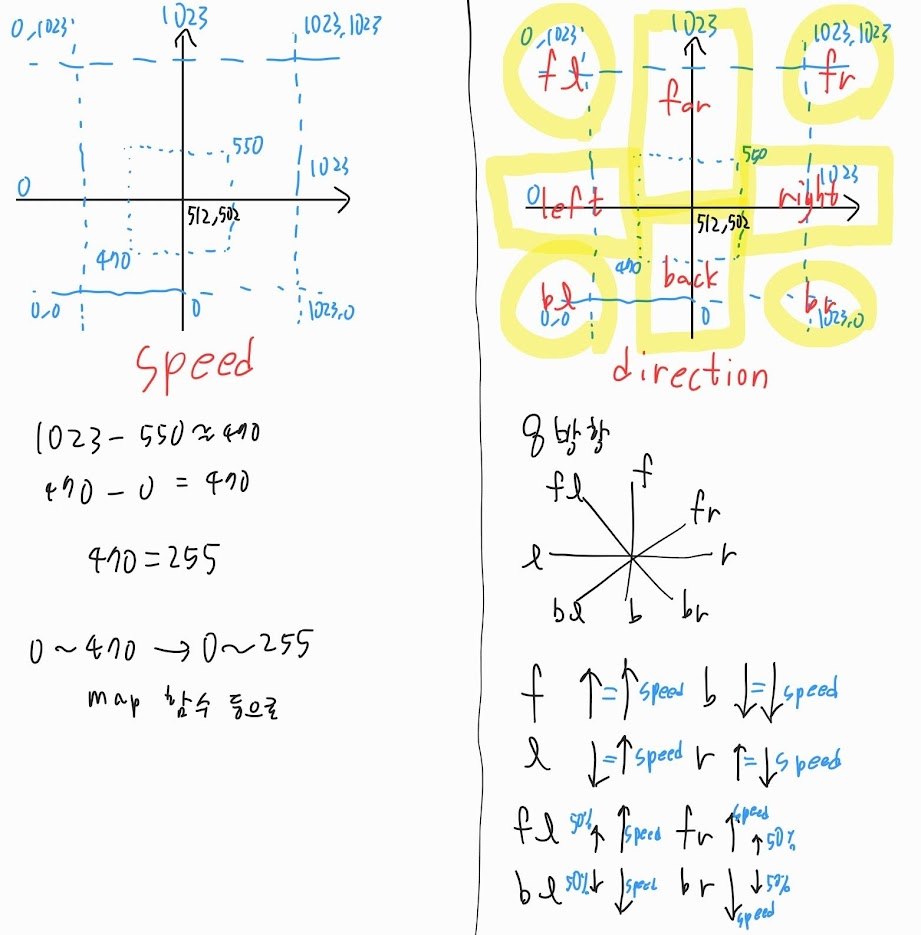
- 먼저 좌표평면처럼 x값이 오른쪽으로 갈수록 커지고, y값이 위쪽으로 갈수록 커지게 한다.
- 0V ~ 5 V 사이의 값이 아날로그 형태로 0 ~ 1023으로 나타내어진다.
- x,y값이 470 ~ 550인 상태는 움직이지 않은 상태로 간주하고 정지 명령을 내린다.
- 속력에서 아날로그 값의 크기가 0 ~ 470정도인데 모터는 0 ~ 255의 PWM값을 조절할 수 있으므로 map함수로 변환시켜준다.
- 방향은 사진의 영역처럼 8방향으로 조종가능하게 한다.
- left와 right는 제자리 선회 방식으로 회전한다.
- forwardleft, forwardright, backwardleft, backwardright는 모터의 속도를 다르게하여 일반적인 방향전환을 한다. (50%->25%로 수정)
3D 프린팅
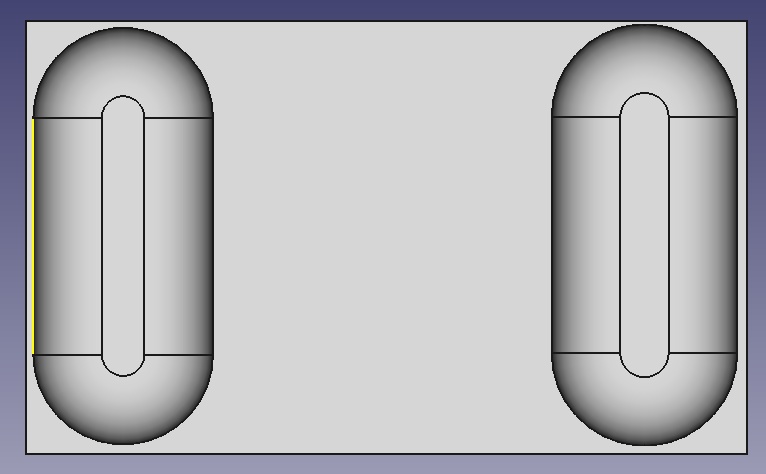
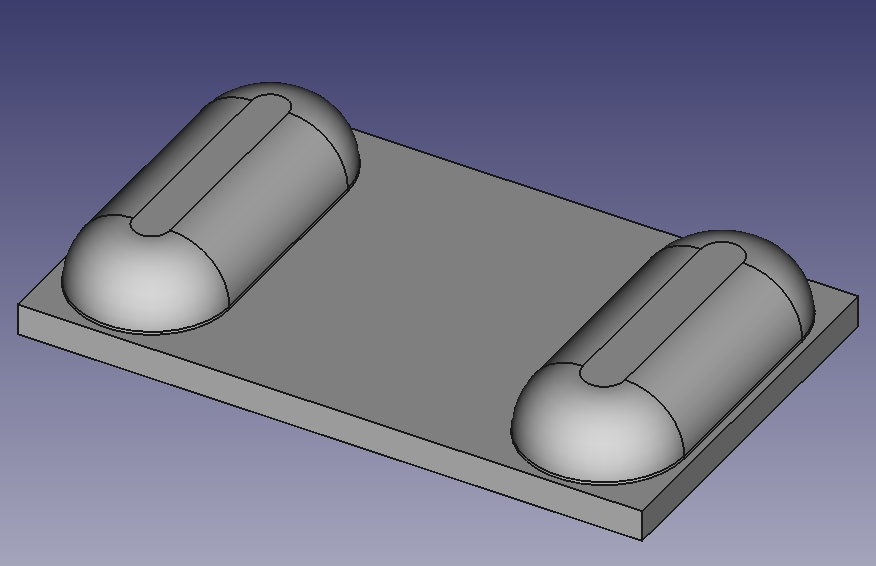
3D 모델링을 한 후 프린팅을 하여 컨트롤러의 케이스를 제작하려 했으나 프린터의 문제로 프린팅 실패
소스 코드
Beacon 제작
![]()
BOT CLE310 3개로 beacon을 구현
- CLE310 작동 전압에 맞게 1.5 V 전지 2개를 직렬 연결하여 3 V의 전원을 공급해준다.
- HOST CLE310이 SCAN할 수 있게 BOT으로 모드를 변경하고 GPI를 LOW로 한다.
- beacon들이 헷갈리지 않도록 pink, orange, yellow로 구분한다.
위치추적 알고리즘 설계
Beacon으로 실험
![]()
HOST에 들어오는 RSSI 값을 보면서 beacon들의 위치를 계속 바꾸고, RSSI 값들을 기록
실험 결과
- 0.20 m 전후로 RSSI 값 -48 ~ -69
- 0.85 m 전후로 RSSI 값 -75 ~ -87
- 5.15 m 전후로 RSSI 값 -87 ~ -93
- 다른 거리에서는 RSSI 값이 유동적으로 변하고 저 거리에서만 명확하게 구분 가능하다.
- 따라서 RSSI 값이 -90일 때를 기준으로 5.15 m 안에 있는지 밖에 있는지 판단한다.
구역 설정

- beacon 3개의 RSSI 값을 이용하여 반지름이 5.15 m인 원 3개 설정한다.
- 원 3개의 벤 다이어그램을 설정하여 구역을 7개로 나눈다.
- 벤 다이어그램 외부 구역은 U이다.
- RSSI 값으로 자동차가 어느 구역에 있는지 판단한다.
알고리즘 설계
- AT+SCAN 커맨드로 근처 5개의 장치의 RSSI 값을 선착순으로 수신한다.
- pink, orange, yellow의 어드레스가 각각 [74:F0:7D:1A:02:C8], [74:F0:7D:1A:02:A5], [74:F0:7D:1A:02:E8] 이므로 이를 이용하여 구분한다.
- beacon들의 어드레스를 이용하여 RSSI 값들을 각각 parsing한다. (자세한 소스 코드는 자동차 소스 코드 참조)
- RSSI 값이 -90일 때를 기준으로 반지름이 5.15 m인 원 안에 있는지 밖에 있는지 판단한다.
- 어느 원 안에 있는지를 판단하여 어느 구역에 있는지 벤 다이어그램에서 판단한다.
작품 구동
조이스틱 컨트롤러
구동 모습
자율주행 자동차
주행 모습
원래 조이스틱 컨트롤러로부터 속력도 수신하여 속력을 조절할 수 있게 하려 했으나 RF통신 특성상 여러 개의 신호를 수신하려면 통신 속도가 길어져 자동차에 적합하지 않다 판단하여 방향 조절만 가능
장애물 회피
Beacon을 이용한 위치 추적

넓은 공터에서 beacon들을 배치하고 자동차를 이동시켜 알고리즘대로 위치추적
자동차의 위치추적 성공
의의
RF통신 경험 - 다중 시리얼 입출력이랑 직접 통신 프로토콜 짜는 경험을 해봄으로서 통신을 배운다.
위치추적 방안 배움 - ToA, TDoA, AoA, RSS 등의 위치추적 방안을 알아보고 각각의 장단점과 정확도를 배운다.
Beacon의 정확도 배움 - Beacon의 정확도가 어느 정도인지 알 수 있게 되었고 추후 Beacon을 활용할 때 유용하게 이용할 것이다.
RF통신과 beacon을 새롭게 경험해보고 여러 알고리즘을 고안해보면서 전반적으로 배울 점이 많았다.
그리고 자율주행 자동차를 조이스틱 컨트롤러로 성공적으로 조종하고 beacon을 통한 위치추적도 성공해서 전반적으로 만족스러운 결과가 나왔다.
개선할 사항
CLE310을 이용한 beacon의 정확도가 떨어져서 처음에 목표했던 삼각측량법을 이용한 정밀한 위치추적이 불가능하게 되었다.
따라서 향후 정확도를 높여 삼각측량법이 가능하게 하여 정밀한 위치추적을 할 수 있도록 노력해야한다.
원래 조이스틱 컨트롤러로부터 속력도 수신하여 자동차의 속력을 조절할 수 있게 하려 했으나 RF통신 특성상 여러 개의 신호를 수신하려면 통신 속도가 길어져 자동차에 적합하지 않다 판단하여 방향 조절만 가능하게 되었다.
따라서 향후 하나의 신호에 자동차의 방향과 속력을 담아 송신할 수 있는 알고리즘을 고안해야한다.
시간상 하지 못했던 3D 프린팅을 통한 컨트롤러의 케이스 제작과 무선 충전 알고리즘 구현도 추후 성공할 수 있도록 노력해야한다.