
작품 소개
애플의 ‘나의 찾기’ 기능은 gps기능과 해당 장소에서는 알람 기능을 실행해준다는 면에서 편리하다. 하지만, ‘나의 찾기’ 기능은 애플기기에만 한정되고 gps 장치가 없는 귀중품에서는 구현될 수 없다는 단점이 있다. 이러한 문제를 해결하기 위해 아두이노의 gps, 피에조 부저를 이용하여 ‘나의 찾기’ 기능 탈부착형 gps 장치를 설계해보고자 한다.
작품 설명
아두이노를 활용하는 작품이다. Neo-6M을 통해 물체의 이동 경로를추적한다. 사용자는 물체를 찾기 위해 gps가 가리키는 위치로 이동할 것이다. 물체에 접근했을 때 찾는 물체가 보이지 않으면 휴대폰 앱을 통해 ‘on’ 버튼을 누르면 된다.
이 신호는 HC-05를 통해 아두이노 시리얼 모니터에 입력된다. ‘on’을 입력 받으면 피에조 부저가 울리면서 물체의 위치를 소리를 통해 자세히 확인할 수 있다. 물체를 찾았으면 ‘off’버튼을 눌러 소리를 끄면 된다. ‘off’버튼을 누르기 전까지 소리는 꺼지지 않는다.
부품
HC-05(블루투스), NEO-6M(gps), 아두이노 핀헤더(1x4) 2.54mm(NEO-6M 납땜을 위해), 피에조 부저, NPN 트랜지스터, 점퍼케이블, 아두이노 MEGA 보드, PC, USB 케이블, 고정저항 1K옴
기타
NEO-6M을 통해 gps 결과값을 확인할려고 했으나, 첫 구매로 온 부품이 작동되지 않아 다시 제품을 구매하기로 했다. 두 번째로 구매한 부품은 납땜도 한 번에 하고 제대로 작동하는지 현장에서 확인하기 위해 세운전자상가에 직접 방문하여 구매하였다. 이 경우 부품은 제대로 작동하였지만, 신호 송신만 되고 gps 결과값을 수신받지 못했다. 부품과 코딩 문제 때문에 시간이 많이 지체되었고, 제출 기간이 얼마 남지 않아 더 이상의 시간 투자가 힘들었다. 따라서 NEO-6M을 이용한 프로젝트를 다루는 블로그를 찾아 제대로 작동했을 떄의 결과값이 어떻게 생기는지 눈으로 확인했다. 또한 본래 작품설계는 지갑에 붙일 수 있을 정도의 작은 크기로 제작하려고 하였으나, 아두이노를 통해 설계하면서 한계를 느꼈고, 미소소자에 대한 지식을 쌓은 후 소형화 작업을 수행하려한다.
코드
#include
int PIEZOSPEAKER_5V_PIN_SIG=5;
int RXPIN=6; int TXPIN=5;
int blueTx=10;
int blueRx=11;
SoftwareSerial mySerial(blueTx, blueRx);
String myString=””; unsigned int piezoSpeaker_5vHoorayLength = 6;
unsigned int piezoSpeaker_5vHoorayMelody[] = {NOTE_C4, NOTE_E4, NOTE_G4, NOTE_C5, NOTE_G4, NOTE_C5}; unsigned int piezoSpeaker_5vHoorayNoteDurations[] = {8 , 8 , 8 , 4 , 8 , 4 }; PiezoSpeaker piezoSpeaker_5v(PIEZOSPEAKER_5V_PIN_SIG);
#define GPSBAUD 9600 TinyGPS gps; SoftwareSerial uart_gps(RXPIN, TXPIN); void getgps(TinyGPS &gps);
void setup() { Serial.begin(9600);
mySerial.begin(9600); uart_gps.begin(GPSBAUD); Serial.println(“기기의 위치를 확인 중입니다”); } void loop() { while(uart_gps.available())
{ int c = uart_gps.read();
if(gps.encode(c))
{ getgps(gps);
}
}
while(mySerial.available()) {
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
char myChar = (char)mySerial.read();
myString+=myChar;
delay(1000); } if(!myString.equals("")) {
Serial.println("input value :"+myString);
if(myString=="on")
{
piezoSpeaker_5v.playMelody(piezoSpeaker_5vHoorayLength, piezoSpeaker_5vHoorayMelody, piezoSpeaker_5vHoorayNoteDurations);
delay(500);
}
if(myString=="onoff")
{
Serial.println("기기를 찾았습니다!!");
myString="";
delay(5);
} } }
void getgps(TinyGPS &gps) { gps.f_get_position(&latitude, &longitude); Serial.print(“Lat/Long: “); Serial.print(latitude,5); Serial.print(“, “); Serial.println(longitude,5);
int year; byte month, day, hour, minute, second, hundredths; gps.crack_datetime(&year,&month,&day,&hour,&minute,&second,&hundredths); Serial.print(“Date: “); Serial.print(month, DEC); Serial.print(“/”); Serial.print(day, DEC); Serial.print(“/”); Serial.print(year); Serial.print(“ Time: “); Serial.print(hour, DEC); Serial.print(“:”); Serial.print(minute, DEC); Serial.print(“:”); Serial.print(second, DEC); Serial.print(“.”); Serial.println(hundredths, DEC); Serial.print(“Altitude (meters): “); Serial.println(gps.f_altitude());
Serial.print(“Course (degrees): “); Serial.println(gps.f_course()); Serial.print(“Speed(kmph): “); Serial.println(gps.f_speed_kmph()); Serial.println();
unsigned long chars; unsigned short sentences, failed_checksum; gps.stats(&chars, &sentences, &failed_checksum); delay(10000); }
작품 사진 및 영상
아두이노 회로 완성 사진 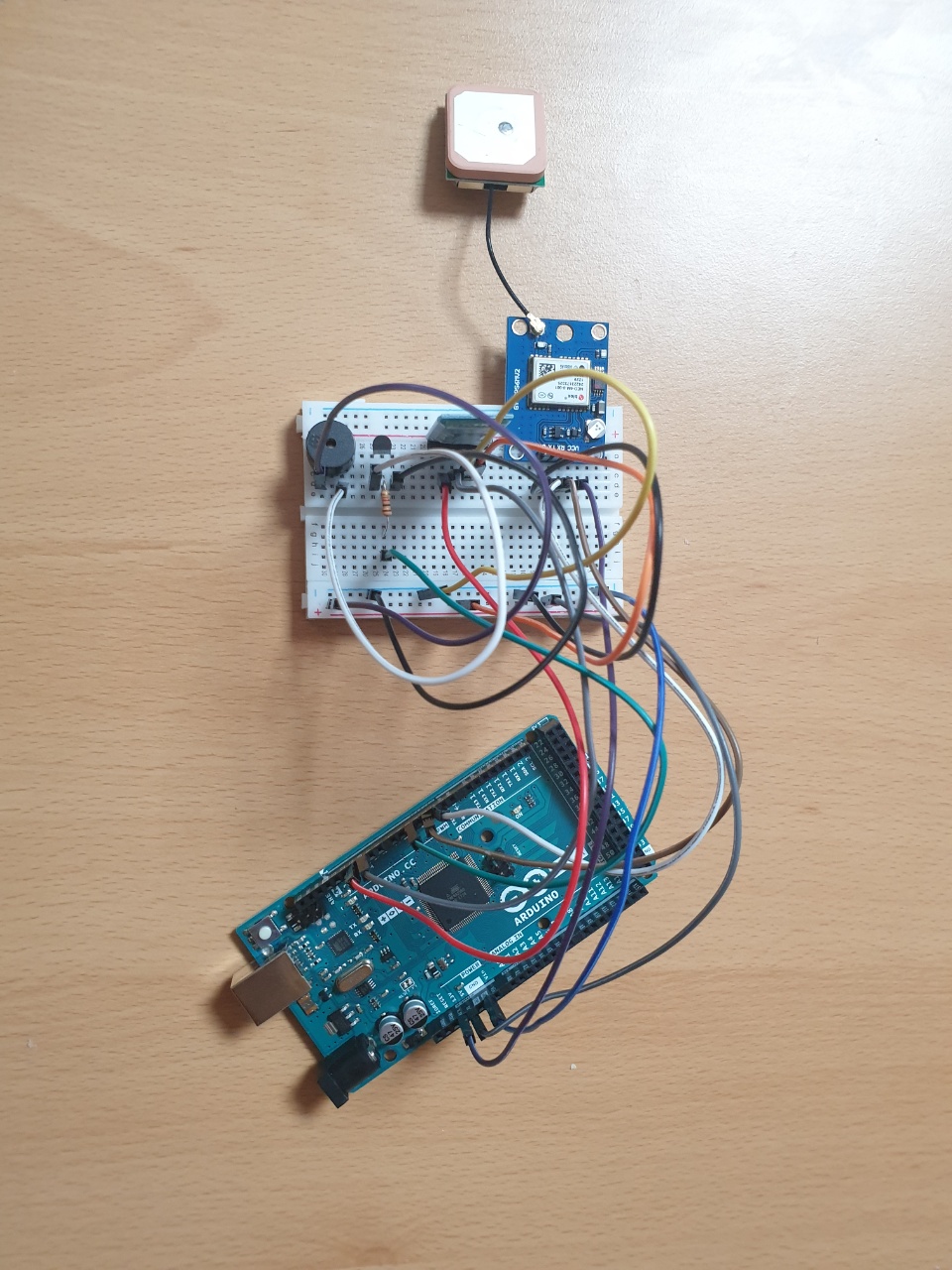
NEO-6M을 통해 gps 결과값 수신하는 사진 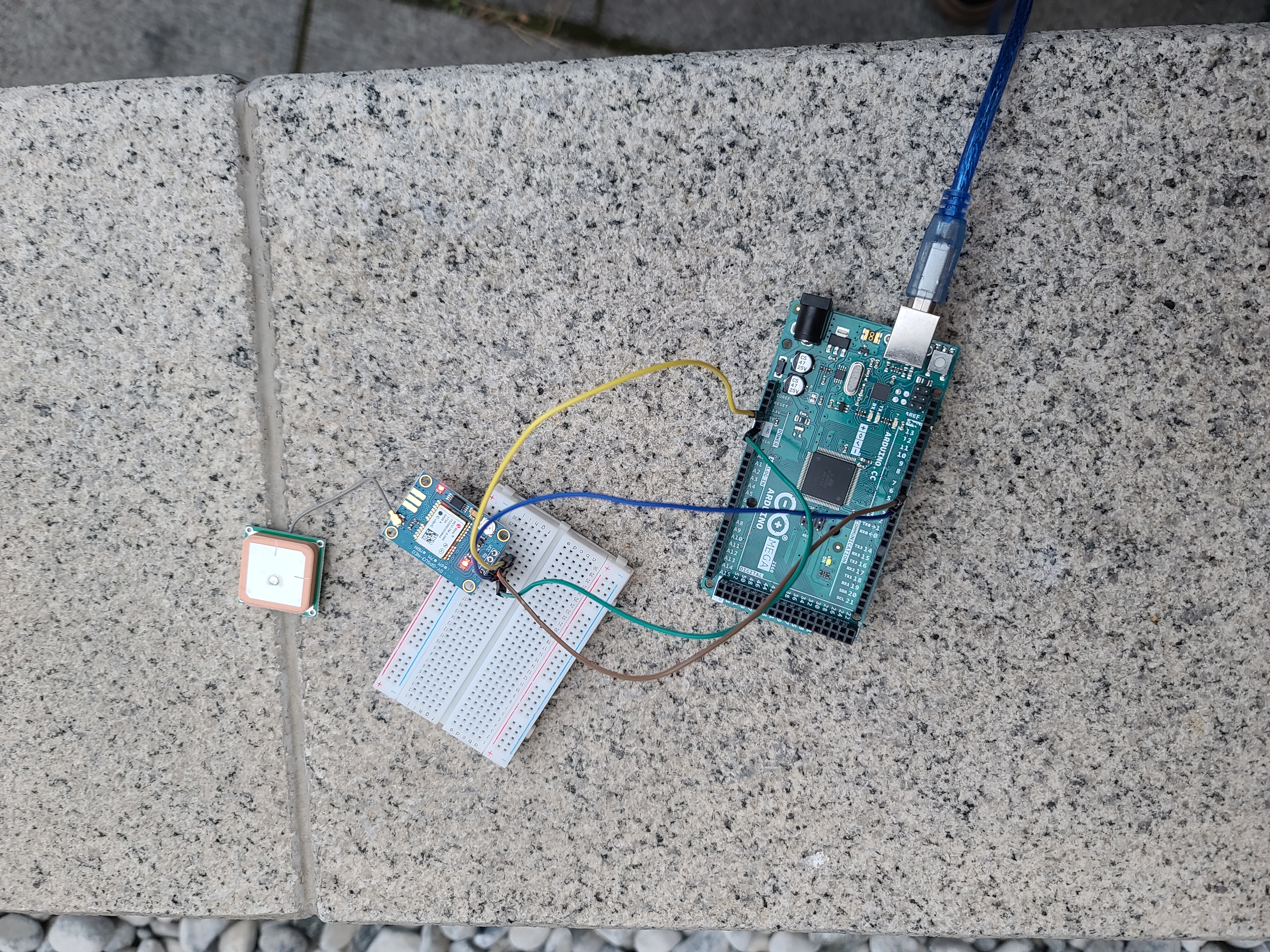
on/off를 통해 피에조 부저 조작 영상